
Les robots sont d’une précision incroyable, mais la délicatesse n’est pas toujours leur point fort. Une machine capable d’assembler une voiture avec une précision quasi parfaite peut tout de même exercer une pression excessive lorsqu’elle intervient dans des endroits où la moindre erreur compte, comme à l’intérieur de l’œil humain ou lors d’une intervention chirurgicale délicate. C’est pourquoi des chercheurs de l’université Jiao Tong de Shanghai développent un nouveau type de capteur de force qui pourrait aider les robots à « ressentir » plus précisément ce qu’ils touchent.
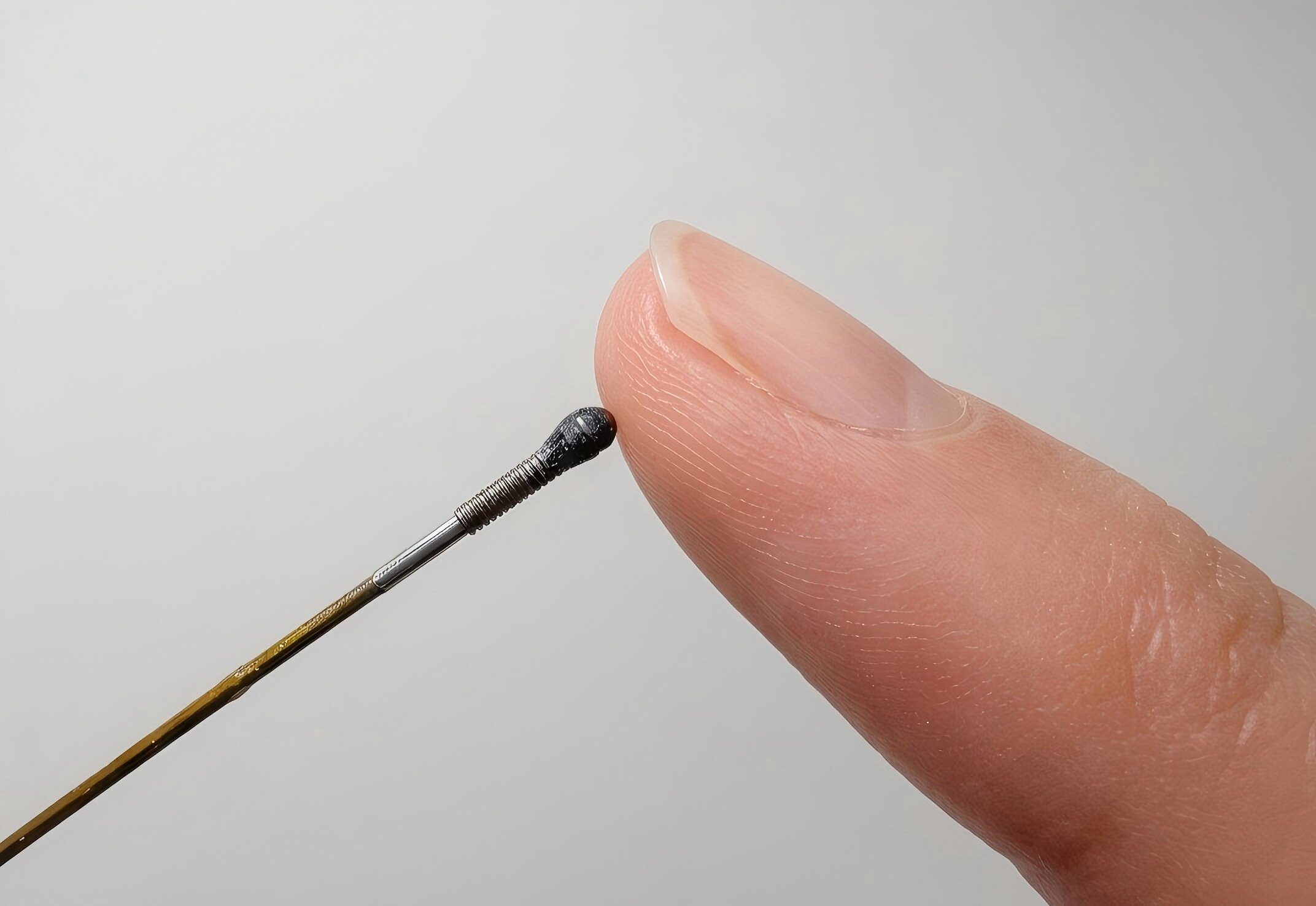
Ce capteur est minuscule, de la taille d’un grain de riz avec une largeur de seulement 1,7 millimètre, ce qui le rend suffisamment petit pour s’intégrer dans des instruments chirurgicaux de pointe. Ce qui le rend particulièrement intéressant, c’est qu’il ne repose pas sur l’électronique traditionnelle. Il utilise plutôt la lumière pour mesurer la force dans toutes les directions, y compris la pression, les mouvements de glissement et la torsion. Voici comment cela fonctionne. À l'extrémité d'une fibre optique se trouve un matériau souple qui change légèrement de forme lorsqu'il entre en contact avec quelque chose. Cette minuscule déformation modifie la façon dont la lumière traverse le capteur. Le motif lumineux ainsi modifié est ensuite transmis par des fibres optiques à une caméra, qui le capture comme une image. Les chercheurs utilisent ensuite un modèle d'apprentissage automatique pour étudier ces motifs lumineux et les traduire en mesures précises de la force. En termes simples, le système apprend à « lire » le toucher à l'aide de la lumière seule, sans avoir besoin d'une multitude de fils ou de multiples capteurs distincts entassés dans un espace aussi minuscule.
Pourquoi les robots doivent-ils sentir, et pas seulement voir ?
L'imagerie chirurgicale moderne est déjà incroyablement avancée. Les chirurgiens peuvent aujourd'hui voir l'intérieur du corps humain avec une clarté impressionnante. Mais une chose leur pose encore des difficultés, en particulier lors d'interventions mini-invasives : sentir réellement ce que leurs instruments touchent. Un chirurgien peut voir clairement la zone sur un écran, mais distinguer un tissu sain d'un tissu pathologique repose souvent sur l'expérience et l'instinct plutôt que sur le retour d'information de l'instrument lui-même.
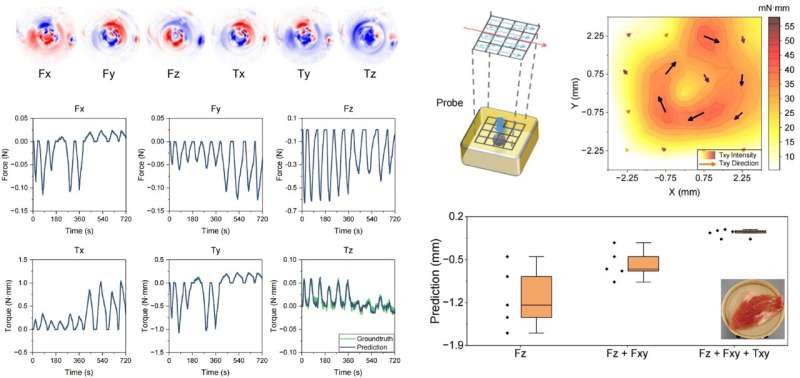
C'est exactement le problème que ce nouveau capteur tente de résoudre. Lors des tests, les chercheurs l’ont utilisé sur un bloc de gélatine molle dans lequel était cachée une petite sphère dure, destinée à imiter une tumeur à l’intérieur d’un tissu humain. Le capteur a détecté l’objet caché en percevant les différences de rigidité à mesure qu’il se déplaçait à la surface. En chirurgie robotique, où les médecins opèrent dans des espaces extrêmement restreints et ne peuvent pas toujours se fier au toucher direct, ce type de retour tactile pourrait rendre les interventions plus sûres, plus précises et bien moins dépendantes des approximations.
Il reste encore du travail à accomplir avant que cette technologie n'atteigne les salles d'opération
Pour l'instant, ces résultats constituent davantage une preuve que le concept fonctionne qu'une avancée médicale aboutie. Les chercheurs eux-mêmes admettent qu'il reste encore beaucoup à découvrir. Fabriquer des capteurs aussi minuscules avec une qualité constante à grande échelle est bien plus difficile que de produire un seul exemplaire fonctionnel en laboratoire. Le processus de mise en place doit également être simplifié et rendu plus fiable avant de pouvoir être utilisé de manière réaliste dans les hôpitaux. De plus, le capteur n'a pas encore subi les tests de résistance à long terme dont les dispositifs médicaux ont besoin avant que les médecins ne leur accordent leur confiance lors d'interventions réelles.
Malgré tout, le principe de base de cette technologie semble véritablement prometteur. Au lieu de s'appuyer sur de multiples composants de détection complexes, le système utilise une configuration beaucoup plus simple, articulée autour d'un seul canal optique et d'une caméra. Ce type de conception simplifiée facilite souvent l'amélioration et la mise à l'échelle des technologies au fil du temps, une fois que l'ingénierie a atteint sa maturité. L'équipe travaille actuellement à l'intégration du capteur dans de véritables outils chirurgicaux robotisés et à son test dans des environnements plus proches de véritables salles d'opération. Et même si un capteur de la taille d'un grain de riz capable de « sentir » peut sembler être une innovation mineure sur le papier, il pourrait s'avérer extrêmement important pour les chirurgiens qui manœuvrent des instruments robotiques dans des espaces plus petits qu'un ongle.


